To skip programming the Drive Subsystem you will need to start using a project template that has that portion of the code completed. To do that we will us the CreateRobotProjectVSCode.cmd program that is in the VSCode folder (this is the same program that you used to create your Minibot project). Only this time, you should enter the following:
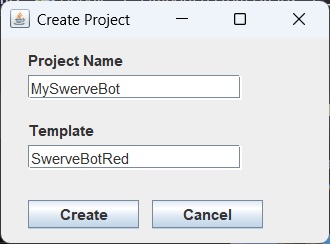
Instead of using the TimedRobot template we are going to choose a template that matches the robot we are using (e.g. SwerveBotRed in the example above). Each robot has a unique set of Drive Subsystem parameters so you will need to choose the template that matches your robot. Your choices are:
- SwerveBotBlue
Once you have created your project, you can load it into VSCode. The project you just loaded has a completed Drive Subsystem as well as the Arcade Drive command. You might want to take some time to look through the code to familiarize yourself with how it works.
At this point, you should pick up the tutorial with the Shooter Subsystem