We will now wire the Chassis
Motor Controllers
First connect the four 13″ Power Cables you previously created to each of the Motor Controllers as shown below. Take care to connect them with the proper polarity.
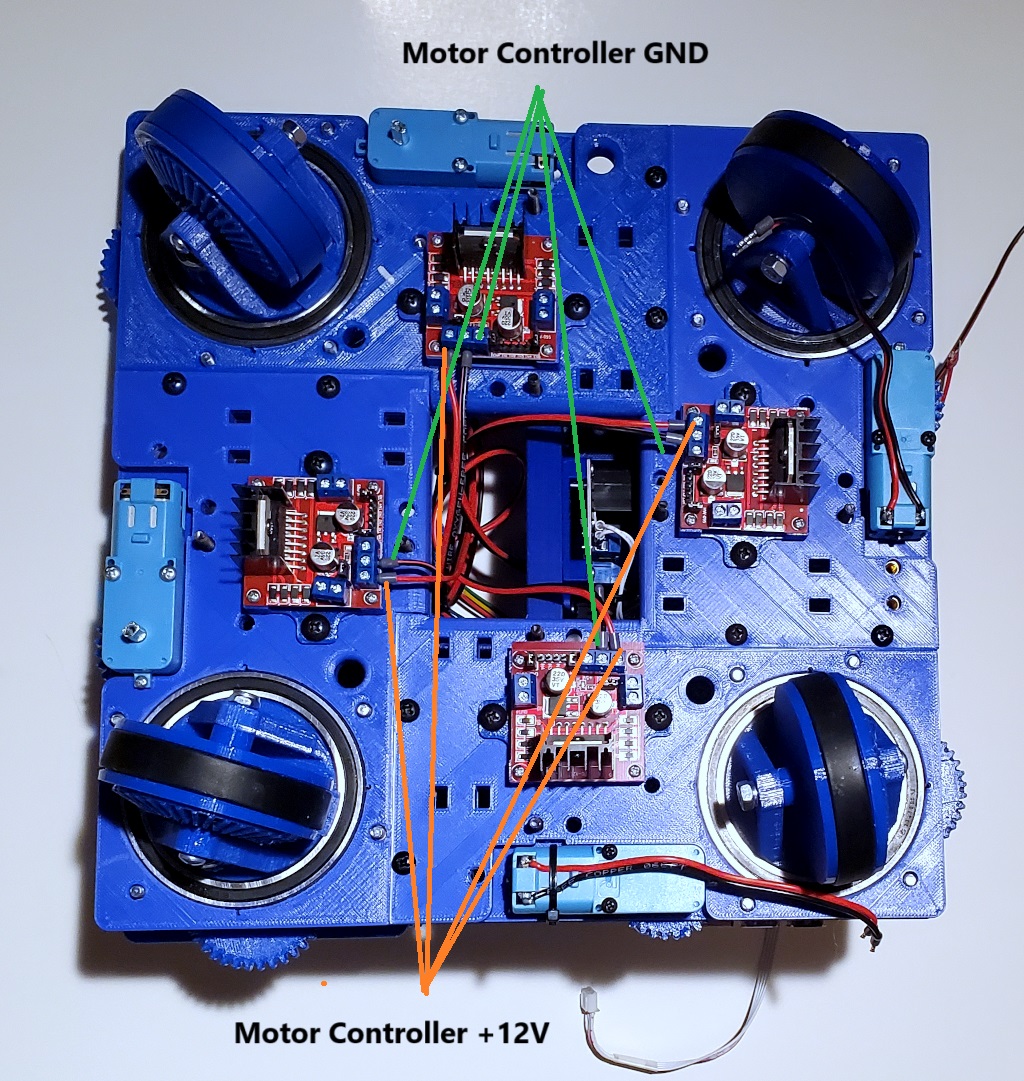
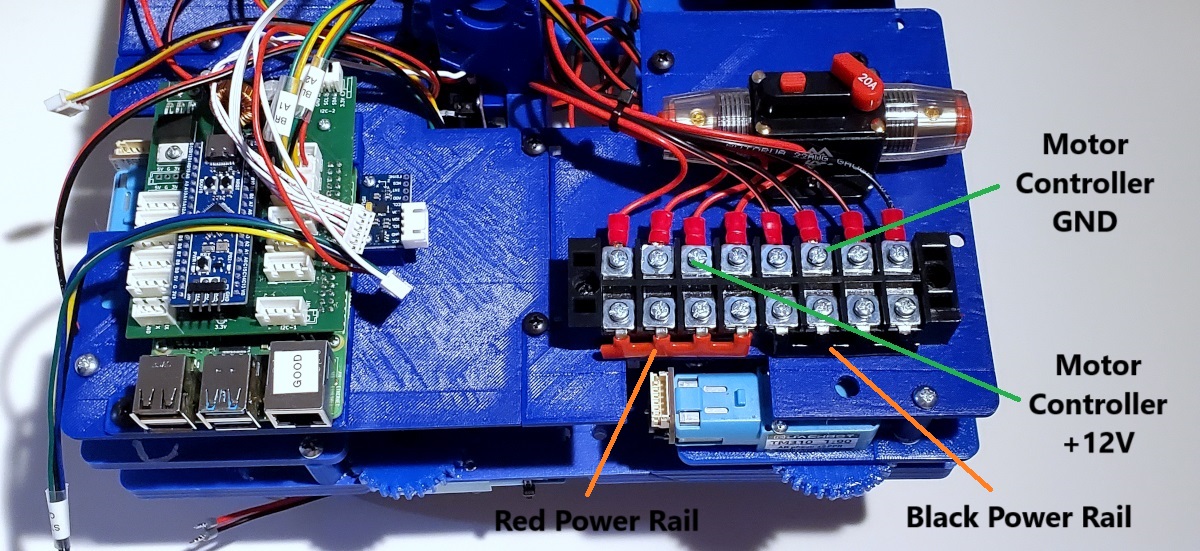
Now connect the other ends of the Power Cables to the Power Distribution Module as shown. At this time also connect the Red and Black Power Rails.
Analog Encoders
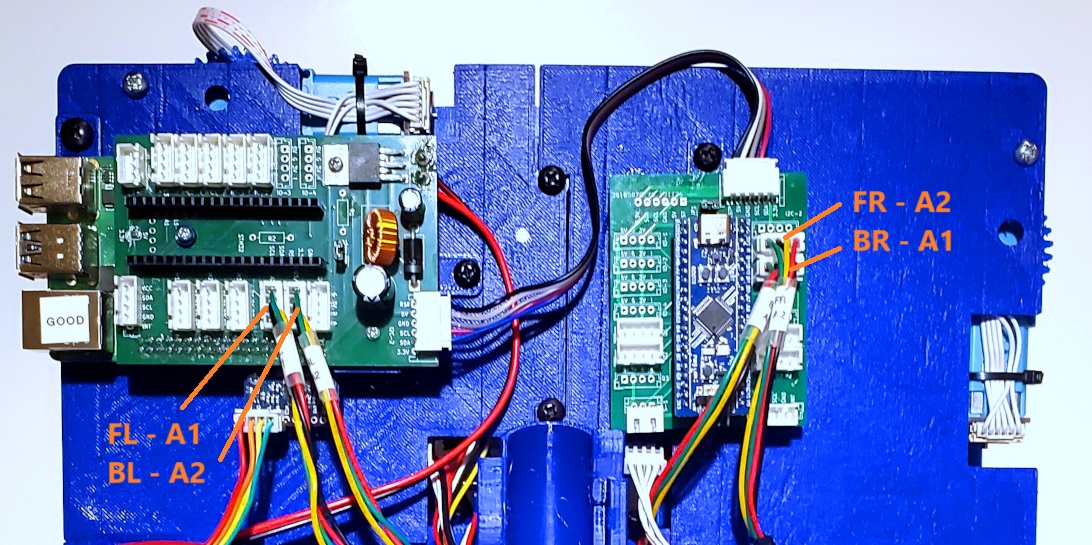
Next connect the four Analog Encoder cables to the two Microcontrollers as shown:
Drive Motors
Then connect the four Quadrature Encoder cables for the Drive Motors as shown:
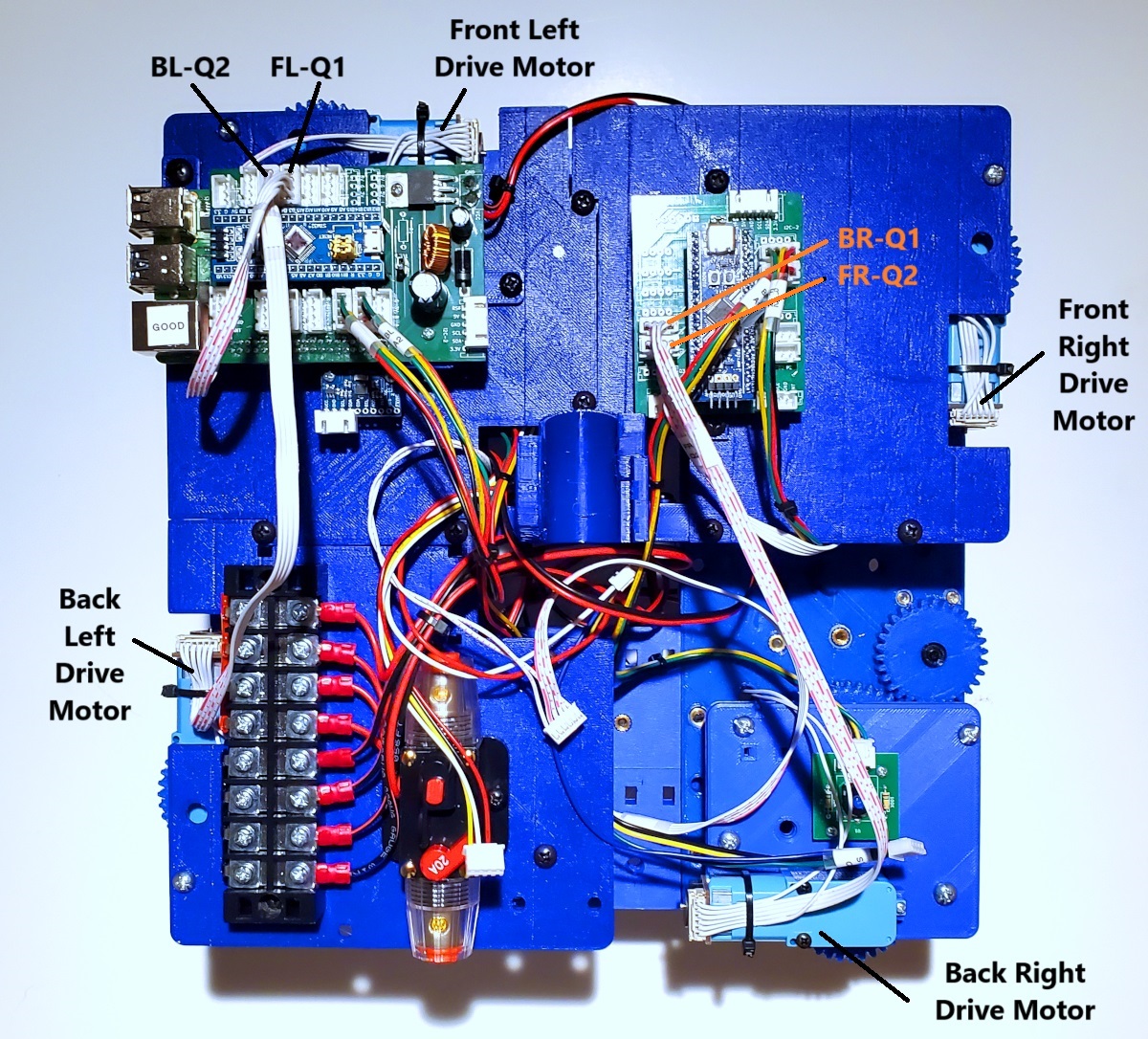
Now feed the Drive Motor Power wires through the Swerve Base and connect them to the Motor Controllers as shown:
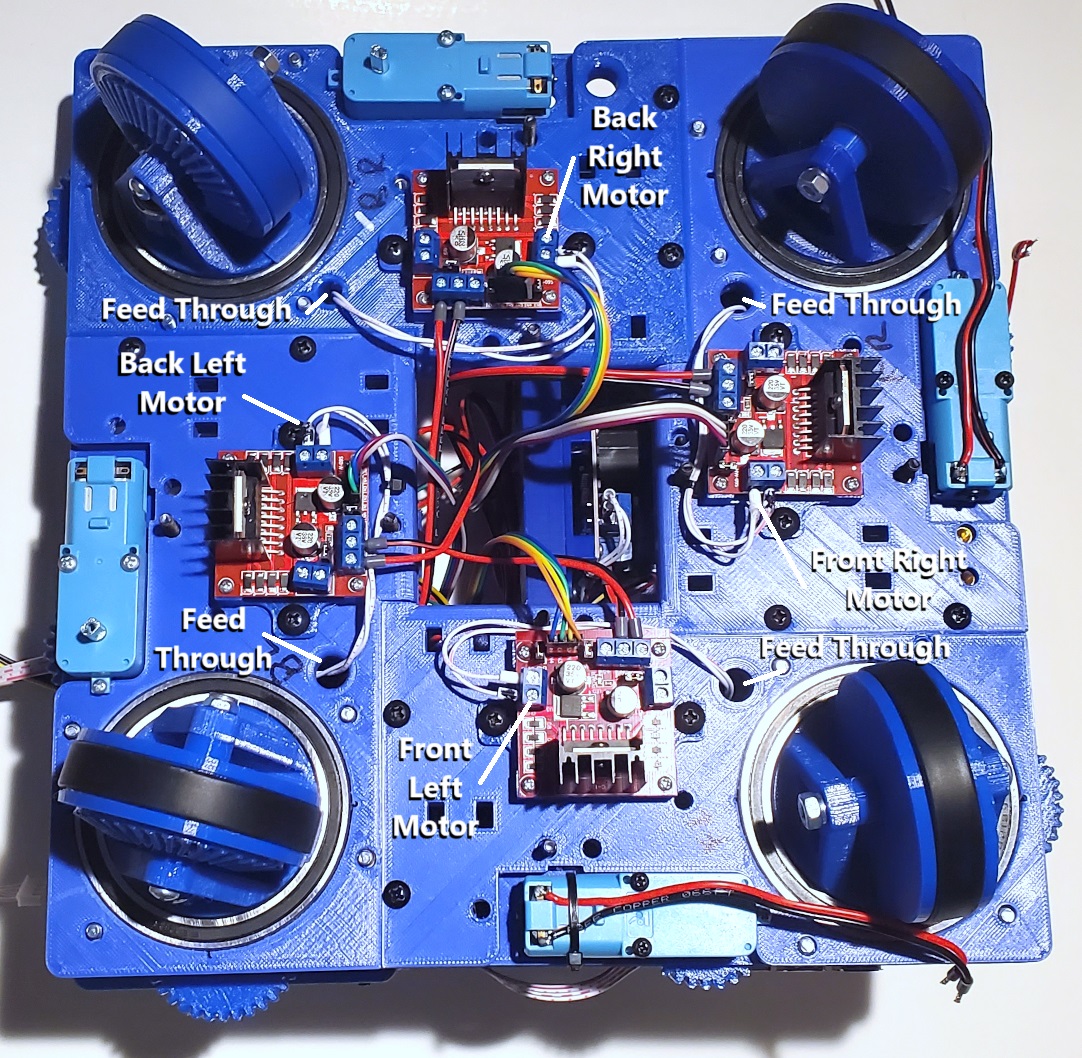
Note that the order in which you connect the power wires to the Motor Controller is not critical. Connecting them as shown is preferred but if you connect them backwards it merely means that the motors will run in the opposite direction. This can be corrected in software by calling the setInverted function for the motor.
Motor Controllers
First connect the four Motor Controller Cables to the Motor Controllers as shown below:
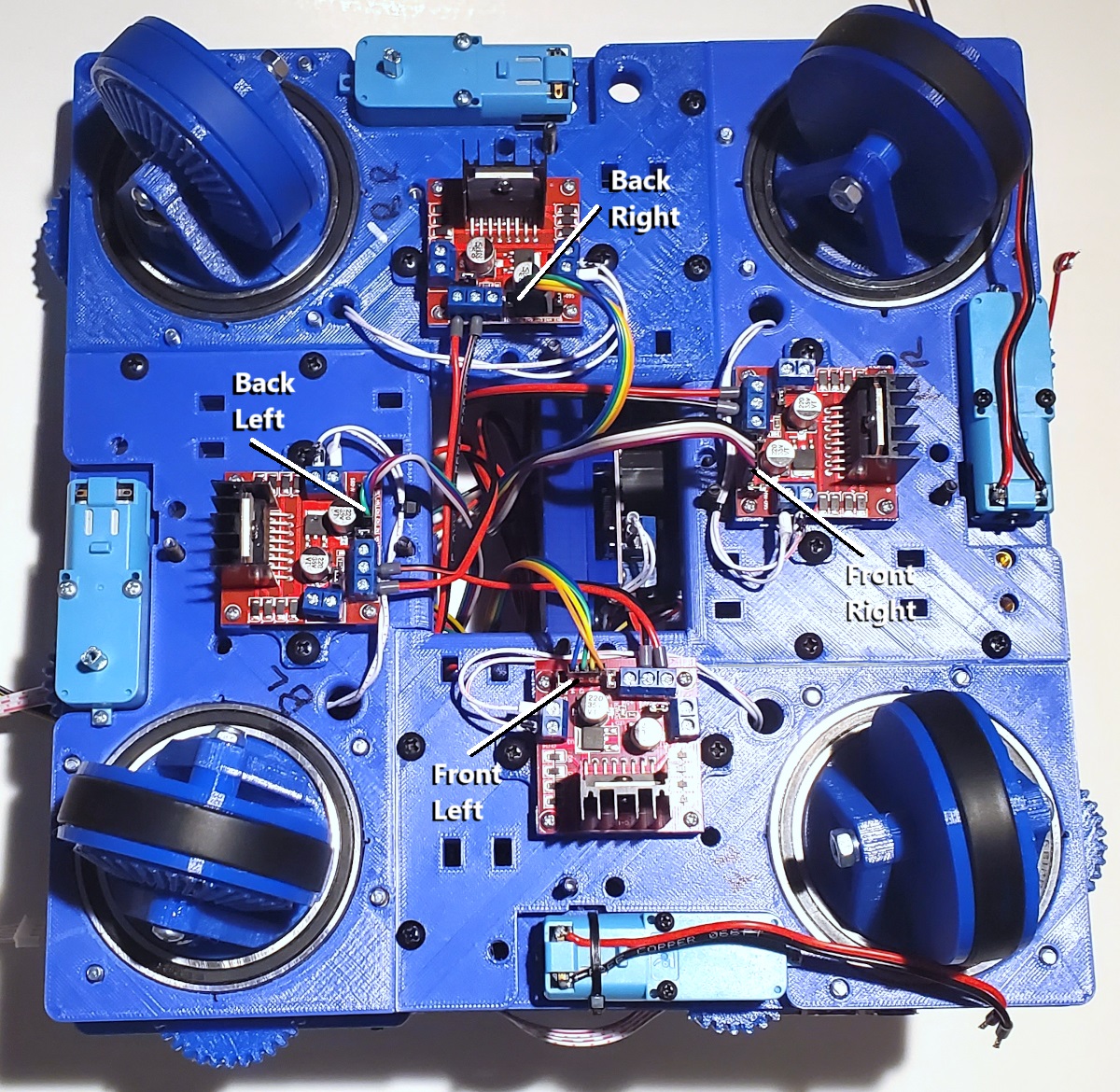
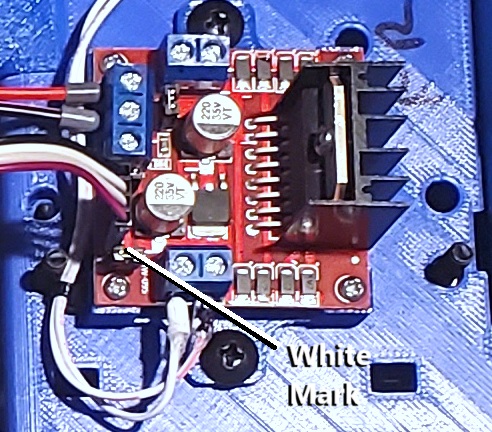
When connecting them, make sure that the edge you marked in white when you created the cables is oriented properly as shown below. If you get this reversed, then the Drive Motor will be switched with the Steering Motor.
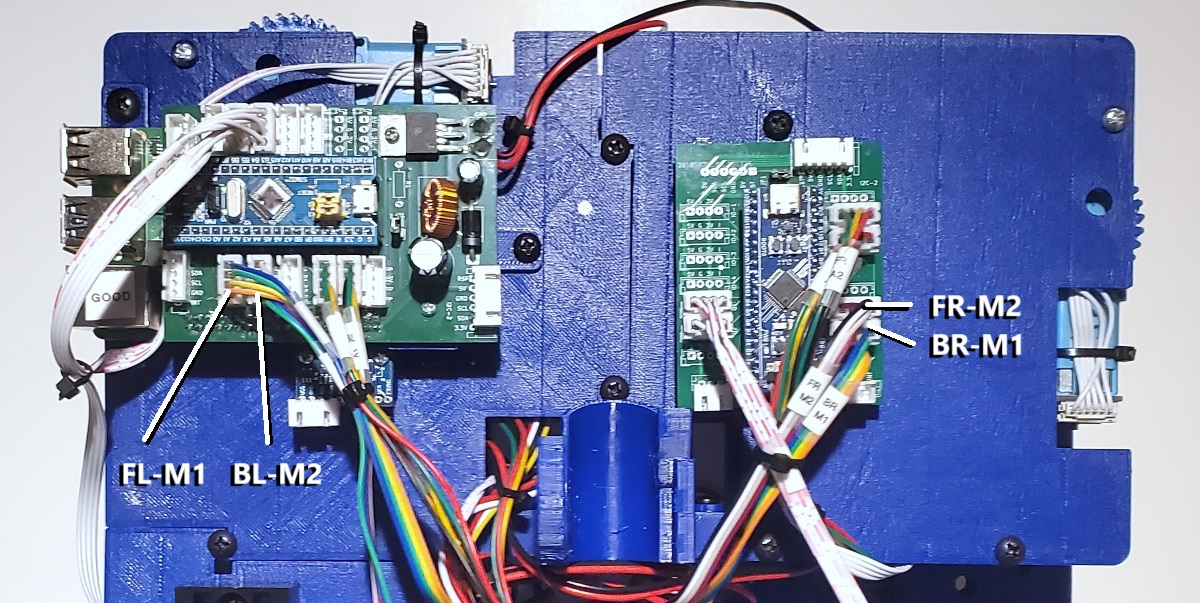
Then connect the other end of the Motor Controller Cables to the Microcontrollers as shown:
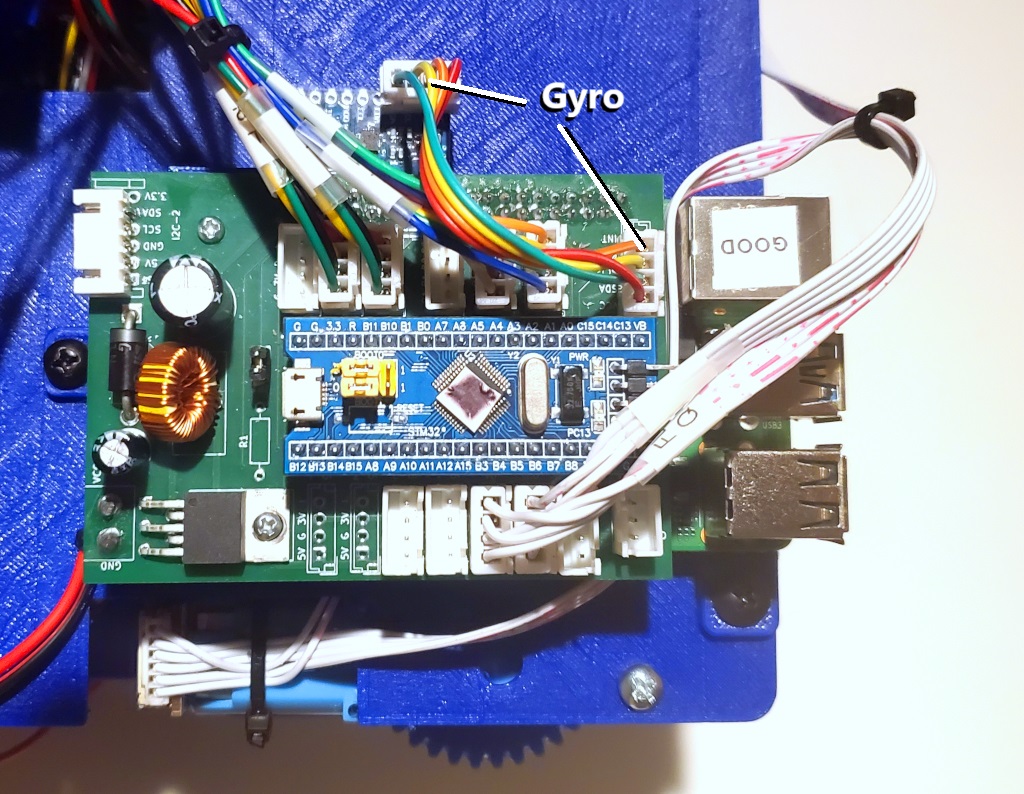
Gyro
Now connect use the Gyro Cable to connect the Gyro to the Microcontroller as shown:
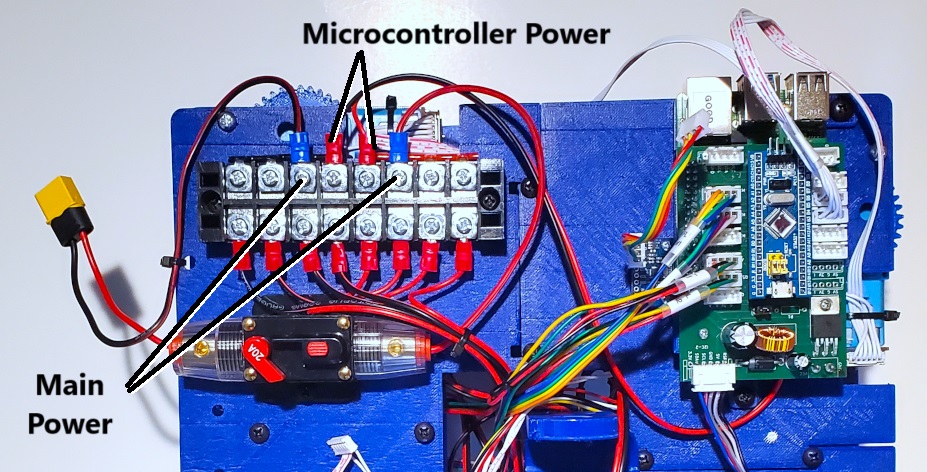
Main Power / Microcontroller Power
Connect the Main Power and the Microcontroller Power as shown:
You can Test The Wiring for the chassis now, or you can wait and do all of the testing once the shooter is complete.